Sphere
At a Glance
- Frequency: 17 sub-parts across 12 of 13 years (2013, 2014, 2015, 2016, 2017, 2018, 2019, 2021, 2022, 2023, 2024, 2025)
- Priority tier: T1
- Marks (count): 10 (7), 12 (1), 13 (1), 15 (8)
- Average solve time: ~10 min
- Difficulty mix: medium 10, easy 5, hard 2
- Section: A | Dominant type: computation
Why This Chapter Matters
The sphere is the single most-tested topic in Analytic Geometry — it has appeared in 12 of the last 13 years (2013–2025), almost always as a 10- or 15-mark Section A question. The object never changes; only the condition imposed on it does. A small, fixed toolkit — the general equation, the tangency test, the pencil of spheres, and the orthogonality condition — disposes of every variant. Learn those four ideas well and you bank 10–15 near-certain marks each year.
Minimum Theory
The general sphere. Every sphere can be written with centre and radius . There are four unknowns , so a sphere is pinned down by four independent conditions — four points, or any mix of point / tangency / orthogonality requirements.
Tangency and the pencil. A plane touches the sphere iff the perpendicular distance from the centre equals the radius, ; the point of contact is the foot of that perpendicular. To construct a sphere through a given circle, use the pencil: if is a sphere and is a plane or second sphere meeting it in that circle, then every sphere through the circle is for some scalar , and one further condition fixes .
Orthogonality. Two spheres with coefficients cut orthogonally iff equivalently along the line of centres. (Fuller derivations of the pencil and orthogonality conditions → appendix.)

Question Archetypes
Nine recurring patterns cover every sphere question in the corpus. Use this map to classify a question in seconds, then jump to the matching section.
| Archetype | You are seeing this when… |
|---|---|
| pencil-family-construction | a sphere is required through a given circle, or through the intersection of a sphere and a plane |
| tangent-plane-contact | a plane touches the sphere — find the contact point, or the condition for tangency |
| sphere-center-locus | a variable plane through a fixed point cuts the axes — find the locus of the centre or of the foot of a perpendicular |
| sphere-through-points | a sphere is required through 3–4 given points (often and the axis intercepts) |
| orthogonal-cutting | the sphere must cut another sphere orthogonally (often while touching a plane) |
| tangent-lines-from-point | tangent lines / a tangent cone are drawn from an external point to the sphere |
| extremal-point | the nearest or farthest point of the sphere from an external point is wanted |
| inscribed-tangent-sphere | the smallest sphere touching two skew lines is wanted |
| tangency-existence | you must decide whether any plane through a given line can touch the sphere |
pencil-family-construction (4 question(s); 2013, 2016, 2023, 2025)
Recognition Cues
- The question says “through the circle …” or “through the intersection of” a sphere and a plane (or two spheres).
- You are given two surfaces that define a circle, plus exactly one extra condition.
- That extra condition is one of: passes through the point …, is a great circle, is cut in a circle of radius …, or touches the plane ….
Solution Template
- Name the circle’s surfaces. Identify (a sphere) and (a plane or a second sphere) whose intersection is the given circle.
- Write the pencil . By construction every member passes through the circle.
- Read off the centre (and radius, if the condition needs it) as functions of .
- Impose the one extra condition to get a single equation in :
- point on sphere → substitute the point;
- great circle → lies on the plane ;
- given cut-radius → with ;
- tangent to a plane → .
- Back-substitute , clear fractions, state the sphere(s). Expect two answers when the condition is quadratic in .

Worked Example(s)
2013 Paper 1, 2013-P1-Q1e (10 marks)
Sphere with intersection of given sphere and plane as great circle.
1 — Surfaces. The sphere has the segment from to as a diameter, so the diameter form gives and the plane is .
2–3 — Pencil and centre. has centre
4 — Condition (great circle). The section plane must pass through the centre, i.e. :
5 — Result. centre , radius . Check: , so the centre lies on . ✓
2016 Paper 1, 2016-P1-Q1d (10 marks)
Find the sphere through the circle x^2+y^2=4, z=0 cut by x+2y+2z=0 in a circle of radius 3.
1 — Surfaces. The circle is the sphere met by the plane .
2–3 — Pencil and centre. ; writing gives centre and .
4 — Condition (cut-radius ). Distance from to is . The chord relation with :
5 — Result. Since , two spheres, centres , radius .
2023 Paper 1, 2023-P1-Q3c (15 marks)
Sphere through circle x^2+y^2+z^2-4x-6y+2z-16=0, 3x+y+3z-4=0 in two cases (point on it; great circle).
Here and ; the pencil is .
Case (i) — through . Substitute the point: Clearing fractions ():
Case (ii) — given circle is a great circle. The centre must lie on . With , substitute into : giving ():
2025 Paper 1, 2025-P1-Q3b (15 marks)
Find the spheres through the circle x^2+y^2+z^2-2x+2y+4z-3=0, 2x+y+z=4 and touching the plane 3x+4y=14.
With and , the pencil has centre
Condition (tangent to ). The distance from to the plane simplifies cleanly: Setting and simplifying gives , so or : Check: and . ✓ Note simply recovers the original sphere .
Common Traps
- “Great circle” = section plane through the centre. Enforce centre lies on the plane and verify it numerically; reading it as “the circle passes through a point” gives the wrong .
- Add only the term the circle’s plane allows. For a circle in the pencil is ; adding - or -terms slides the sphere off the circle.
- Use the perpendicular distance, properly normalised. In both and the tangency test, divide by (e.g. ).
- Expect two spheres when the condition is quadratic in (cut-radius, tangency) — report both. Clearing fractions should leave all-integer coefficients, a useful correctness signal.
sphere-center-locus (3 question(s); 2017, 2021, 2022)
Recognition Cues
- A variable plane meets the coordinate axes at , subject to a constraint (passes through a fixed point , or the sphere has constant radius).
- A sphere is taken through , and you must find the locus of its centre (or of the foot of the perpendicular from to plane ).
Solution Template
- Intercept-form plane , meeting the axes at . Write the given constraint:
- plane through → ;
- constant radius → .
- Sphere through . Through kills the constant term (); through gives , so the sphere is with centre .
- Introduce the locus point (the centre, or the foot of the perpendicular) and express in terms of it (e.g. ).
- Eliminate with the constraint; replace for the locus.
Worked Example(s)
2017 Paper 1, 2017-P1-Q2b (15 marks)
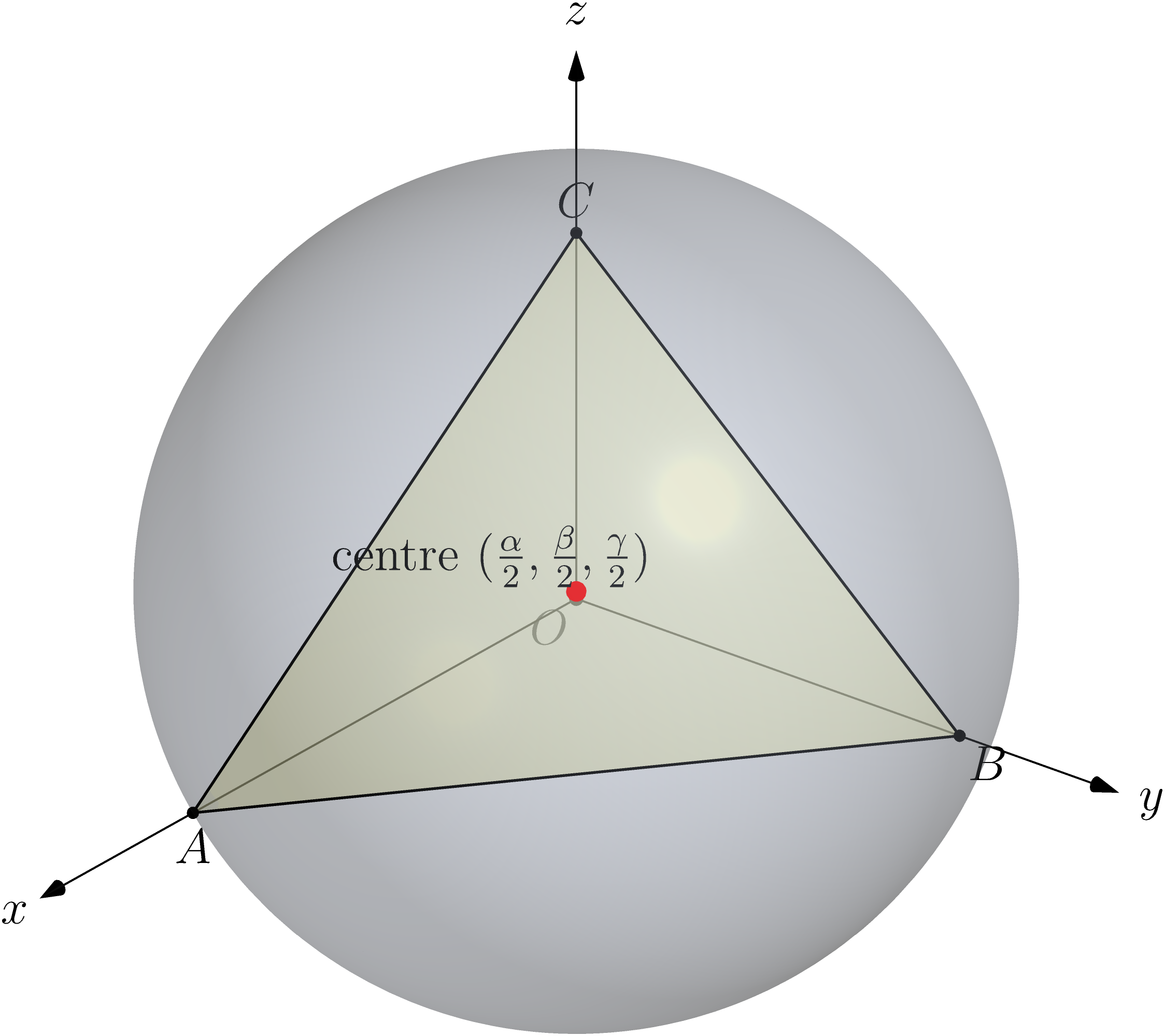
Plane through fixed (a,b,c) cuts axes at A,B,C; find locus of centre of sphere through O,A,B,C.
1 — Plane + constraint. through gives
2 — Sphere through is , centre .
3 — Locus point. Set the centre , so .
4 — Eliminate. Substituting into the constraint: equivalently . (The becomes a precisely because the centre is at half the intercepts.)
2021 Paper 1, 2021-P1-Q3b (15 marks)
Sphere radius r through O cuts axes at A,B,C; locus of foot of perp from O to plane ABC.
This is the constant-radius / foot-of-perpendicular variant. Sphere through and has centre and radius , so the constraint is .
Foot of perpendicular from to plane lies along the normal ; substituting into the plane gives , and one finds with etc.
Eliminate via : (Check with the symmetric sphere : the foot is , and the locus reduces to . ✓)
2022 Paper 1, 2022-P1-Q1e (10 marks)
Variable plane through (a,b,c) meets axes at A,B,C; find locus of centre of sphere through O,A,B,C.
Identical setup to the 2017 example (a plane through a fixed point ; locus of the centre of the sphere through ). Centre , set it to so etc., and the through-point condition becomes That this 10-mark question (2022) and the 15-mark question (2017) have the same answer shows how stable this archetype is — learn it once.
Common Traps
- The centre is at half the intercepts (). Forgetting the factor of 2 turns the in the constraint into a wrong constant — the right locus is , not .
- “Through ” kills the constant term (); the linear coefficients then come from passing through — derive , don’t guess the sign.
- “Constant radius ” encodes — that is the constraint you eliminate with.
- Keep the locus in centre-coordinates ; do not leave the intercepts in the final answer.
tangent-plane-contact (3 question(s); 2014, 2015, 2017)
Recognition Cues
- The words “touches”, “tangent plane”, or “point of contact”.
- Asked to find a parameter (e.g. ) that makes a plane tangent.
- “tangent plane parallel to [a given plane]” — a variant where the radius to the contact point is parallel to that plane’s normal.
Solution Template
- Standard form. Complete squares to read off centre and radius .
- Tangency test. A plane touches iff . To find an unknown parameter, set and solve (often a quadratic).
- Point of contact = foot of perpendicular from : keeping the sign of so you step to the correct side.
- Parallel-plane variant. If the tangent plane must be parallel to a plane with normal , the contact points are (the two ends of the diameter along ).
- Verify the contact lies on both the plane and the sphere, and .

Worked Example(s)
2014 Paper 1, 2014-P1-Q4a-i (10 marks)
Find points on sphere x²+y²+z²-4x+2y=4 where tangent plane parallel to 2x-y+2z=1.
This is the parallel-plane variant (template step 4).
1 — Standard form. , so , .
4 — Radius parallel to the given normal. The given plane has normal , . The contact points are They are diametrically opposite, as they must be — the two parallel tangent planes sit on opposite sides of the sphere. (Both satisfy the sphere equation: .)
2015 Paper 1, 2015-P1-Q1e (10 marks)
For positive a, find when plane ax-2y+z+12=0 touches sphere x^2+y^2+z^2-2x-4y+2z-3=0; find point of contact.
1 — Standard form. , so , .
2 — Tangency fixes . With plane , Squaring: , i.e. or . The positive value is .
3 — Point of contact (now the plane is , , ). Here , so
5 — Verify. On the plane: ✓; ✓.
2017 Paper 1, 2017-P1-Q2c (10 marks)
Show the plane 2x-2y+z+12=0 touches a given sphere; find the point of contact.
This is the pure tangency test on the same sphere as the previous example, , .
2 — Show tangency. For , , : so the plane touches the sphere.
3 — Contact. As above, , lying on both surfaces. ✓
Common Traps
- Keep the sign of when stepping from the centre to the contact point — the absolute value lands you on the wrong side of the sphere.
- Keep in the denominator of the foot-of-perpendicular formula; that in these examples is a coincidence, not a rule.
- A tangency quadratic has two roots — read the question for which one is wanted (here, ).
- Verify the contact point on both the plane and the sphere. It is the cleanest confirmation; for the parallel-plane variant, remember the two contact points are diametrically opposite.
sphere-through-points (2 question(s); 2018, 2019)
Recognition Cues
- A sphere is required through given points — typically four (a sphere has four degrees of freedom).
- A “circle through ” or “circle circumscribing triangle ” in space — recognise it as (a sphere through ) (their plane).
Solution Template
- General sphere (four unknowns ).
- Substitute the easiest point first. If the origin is among the points, immediately and the rest of the algebra is much lighter.
- Substitute the remaining points to get a linear system in (and ); solve it.
- Clear fractions and state the sphere. Circle variant: a circle in space needs two equations — present the sphere and the plane.
- Verify every given point satisfies the final equation.
Worked Example(s)
2018 Paper 1, 2018-P1-Q3d (12 marks)
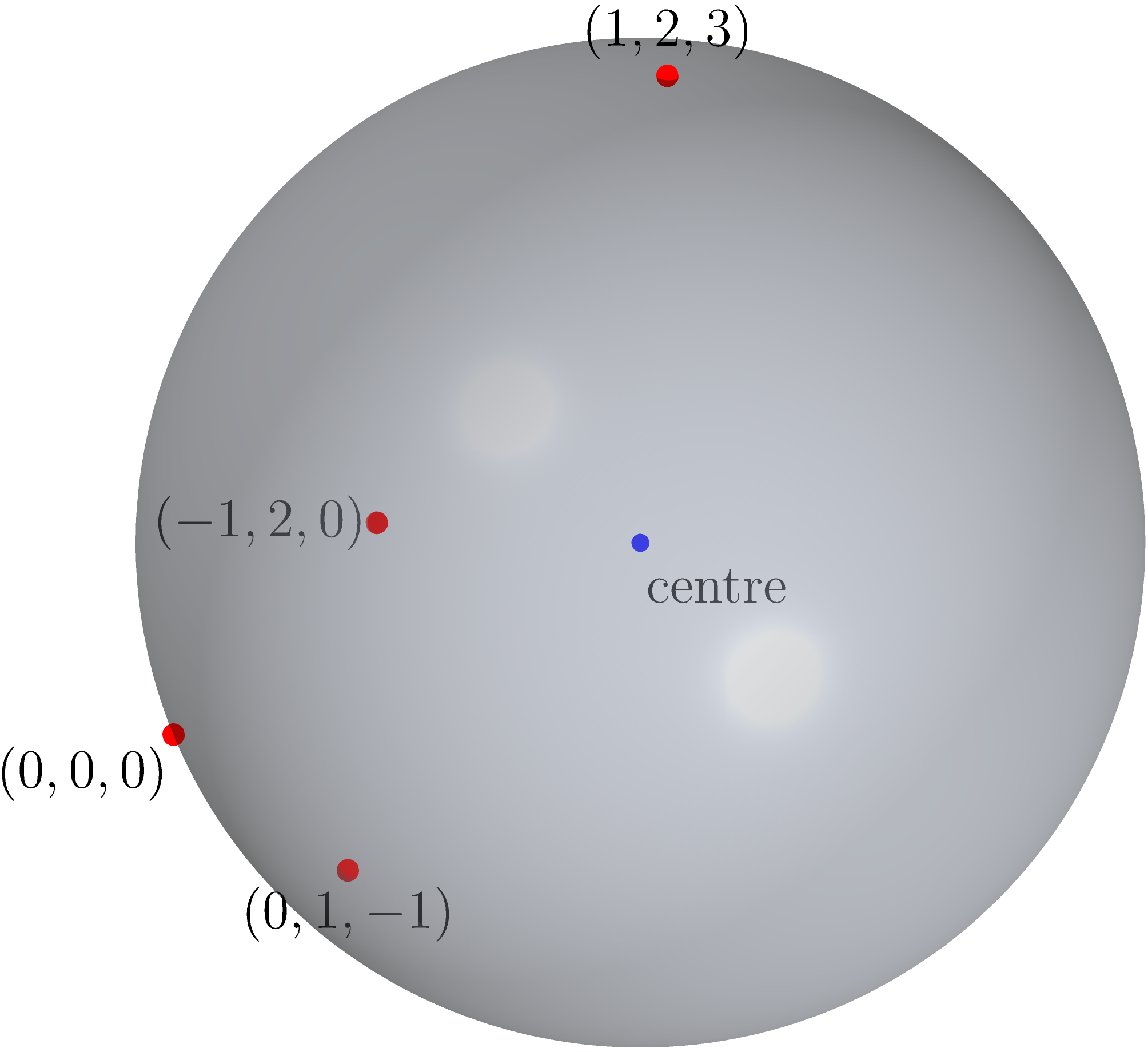
Find the sphere through (0,0,0),(0,1,-1),(-1,2,0),(1,2,3).
1–2 — Origin first. gives , so .
3 — Remaining points. Solving: , then and give .
4 — Sphere. Clearing the sevenths,
5 — Verify. : ✓; the other three check similarly. Centre , radius — a genuine sphere.
2019 Paper 1, 2019-P1-Q2c-i (10 marks)
Plane x+2y+3z=12 meets the axes in A,B,C; find the circle circumscribing triangle ABC.
This is the circle variant. The plane meets the axes at . The circumscribing circle of is (a sphere through ) (the plane); take the sphere through .
Sphere through (): ; ; , so
The circle is the pair of equations: (Sphere centre , ; distance to the plane , so the section is a real circle.)
Common Traps
- Substitute the origin first when it is one of the points — it kills and lightens every later equation. Keep coefficients as exact fractions, then clear to a tidy integer form.
- A circle in space needs two equations — a sphere and a plane. Reporting only the sphere is a marks-losing omission; the origin-passing sphere is just the cleanest choice of sphere through the three points.
- Always verify all given points satisfy the final equation — the cheapest insurance against an arithmetic slip in the linear system.
extremal-point (1 question(s); 2015)
Recognition Cues
- Asked for the point of the sphere at maximum (or minimum) distance from a given external point.
Solution Template
- Identify centre , radius , and the external point .
- The extreme points lie on the line . This is pure geometry — no Lagrange multipliers needed.
- Nearest (toward ), at distance ; farthest (opposite side of from ), at distance .

Worked Example(s)
2015 Paper 1, 2015-P1-Q3b (13 marks)
Point of sphere x^2+y^2+z^2=1 at max distance from (2,1,3).
1 — Data. has , ; external point with .
2–3 — Farthest point. It lies on line , on the far side of from , i.e. in direction : The answer points opposite to — the quickest sanity check that it is the farthest, not the nearest, point. (, so it is on the sphere.)
Common Traps
- Reach for geometry, not Lagrange multipliers. The extreme points are simply where line meets the sphere — instant, and impossible to get wrong.
- Farthest is the opposite direction. The farthest point lies on the far side of the centre from (direction ); the nearest is on the near side. Mixing them up flips the sign of the answer.
inscribed-tangent-sphere (1 question(s); 2022)
Recognition Cues
- The smallest sphere that touches two (skew) lines.
Solution Template
- Read off a point and direction on each line: and .
- Find the feet of the common perpendicular , by solving and .
- Centre midpoint of ; radius (shortest distance).
- Write the sphere and verify its distance to each line equals the radius.

Worked Example(s)
2022 Paper 1, 2022-P1-Q3c (15 marks)
Sphere of smallest radius tangent to two given skew lines.
1 — Data. ; , so .
2 — Feet of the common perpendicular. Solving here gives , because already. So are themselves the feet — a pleasant shortcut.
3 — Centre and radius. Centre ; radius .
4 — Sphere. The centre’s distance to each line works out to . ✓
Common Traps
- Always test for the shortcut. If (equivalently ), the given points are already the feet of the common perpendicular and — saving the whole linear solve.
- Smallest sphere diameter shortest distance. The centre is the midpoint of the common-perpendicular segment and the radius is half it; don’t use the full distance.
orthogonal-cutting (1 question(s); 2024)
Recognition Cues
- The required sphere must cut a given sphere orthogonally, usually combined with another condition (often touches a plane at a point).
Solution Template
- General sphere with unknowns ; each condition gives one equation.
- “Touches a plane at ” gives two: (a) lies on ; (b) the centre lies on the normal through , so parametrise (cleanest for signs).
- “Cuts orthogonally” gives .
- Solve for the parameter(s), recover , and state the sphere.

Worked Example(s)
2024 Paper 1, 2024-P1-Q4c (15 marks)
Find sphere touching plane 3x+2y-z+2=0 at (1,-2,1) and cutting orthogonally x^2+y^2+z^2-4x+6y+4=0.
Touches at and cuts orthogonally.
2(b) — Centre on the normal. With , set , giving .
2(a) — on the sphere gives .
3 — Orthogonality with (): . Substituting,
4 — Recover and state. : Checks: on it (); ; . ✓
Common Traps
- Parametrise the centre as . It tracks signs far more reliably than writing with a separate scalar.
- Memorise the orthogonality condition — it is just expanded, and it is the load-bearing equation here.
tangency-existence (1 question(s); 2025)
Recognition Cues
- Asked to decide whether any plane through a given line can touch the sphere (often phrased “show that no tangent plane through the line exists”).
Solution Template
- Sphere → centre , radius .
- Write the line as the intersection of two planes .
- Pencil of planes through the line: .
- Impose tangency → a quadratic in . Real roots ⇒ tangent planes exist; negative discriminant ⇒ none. (Also check the excluded plane .)
- Cross-check geometrically: if the line is a secant, so every plane through it cuts the sphere and none can be tangent.

Worked Example(s)
2025 Paper 1, 2025-P1-Q4a (15 marks)
Show there is no tangent plane to the sphere x^2+y^2+z^2-4x+2y-4z+4=0 through the line (x+6)/2=y+3=z+1.
1 — Sphere. : centre , .
2 — Line as two planes. gives and .
3 — Pencil. .
4 — Tangency. Setting : Discriminant : no real , so no plane of the pencil is tangent (and alone is at distance ).
5 — Cross-check. , so the line is a secant — it pierces the sphere, confirming no plane through it can touch.
Common Traps
- The discriminant is the answer. “No tangent plane exists” the tangency quadratic in has negative discriminant; state that explicitly rather than just failing to find a root.
- Don’t forget the excluded plane. The pencil omits itself (the member); check it separately.
- Back it with the secant cross-check (): a one-line geometric confirmation that graders reward.
tangent-lines-from-point (1 question(s); 2013)
Recognition Cues
- Tangent lines (a tangent cone) drawn from an external point to the sphere — especially three mutually perpendicular tangent lines (the director sphere).
Solution Template
- Tangent-cone semi-angle. From an external point , the tangent lines to a sphere (centre , radius ) form a cone of semi-angle with .
- Three mutually perpendicular tangent lines. Each makes angle with , so ; orthonormality gives , hence , i.e. .
- Combine with to get the locus of (the director sphere).

Worked Example(s)
2013 Paper 1, 2013-P1-Q4a (15 marks)
Three mutually perpendicular tangent lines from any point on sphere 2(x²+y²+z²)=3r² to sphere r.
Show that three mutually perpendicular tangent lines to can be drawn from any point on .
1–2 — Angle condition. A point on has , so the tangent cone has , hence .
3 — Orthonormal frame exists. Three mutually perpendicular tangent directions would need , and orthonormality forces their sum to be : — exactly the value above. So such a frame exists for every on the given sphere. (This locus, , is the director sphere for perpendicular tangent lines.)
Common Traps
- Lines, not planes. The director sphere for perpendicular tangent lines is ; the perpendicular tangent planes result is the different . Don’t conflate them.
- The sum-of-squared-cosines identity is the whole trick. for any orthonormal frame turns “three perpendicular tangents” into the single equation .
Marks-Aware Writing
A correct final equation alone rarely earns full marks — examiners reward a visible, justified method.
- Set up explicitly. Write the general sphere (or the pencil ) and name the centre/radius before imposing anything. Don’t jump straight to the answer.
- Name each condition as you use it: “tangency ”, “great circle centre on the plane”, “orthogonal ”. One labelled line per condition is worth easy marks.
- Show the elimination. A 15-mark answer is expected to carry the full algebra (solving the system / clearing fractions); a 10-mark answer should still show the key steps and the result, not just the final line.
- Box the equation and verify cheaply. A one-line check — a defining point satisfies the sphere, or — is reliably rewarded.
- Report every solution. Cut-radius and tangency conditions are quadratic, so give both spheres; loci should be left in clean form.
Practice Set
All 17 primary instances are worked above, so these are questions where the sphere plays a supporting role — good practice at deploying the toolkit inside a larger problem.
- 2024-P1-Q1e (10 m) — right circular cylinder through a circle: the circle is a sphere plane; the cylinder’s axis runs along the plane normal.
- 2023-P1-Q2c-ii (10 m) — cone from to circle : build the auxiliary sphere through , then take rays from .
- 2023-P1-Q4c (15 m) — image of a line in a plane: the reflection uses the same foot-of-perpendicular step as tangent-contact.
- 2013-P1-Q4b (15 m) — cone through a base circle in : impose the rectangular-hyperbola section condition (coeff sum ).
- 2015-P1-Q6c (12 m) — orthogonal surfaces at a point: the same orthogonality idea via .
- 2019-P1-Q2c-ii (10 m) — enveloping cone cut by a plane: form , set , apply coeffcoeff.